 制御工学
制御工学 状態方程式と伝達関数の相互変換
線形時不変な状態方程式\begin{align}\dot{x}(t) &= Ax(t)+Bu(t) \\y(t)&=Cx(t)+Du(t)\end{align}と伝達関数との関係について考える。状態方程式をラプラス変換すれば\begin{a...
制御工学 制御工学 制御工学 制御工学 制御工学 制御工学 制御工学 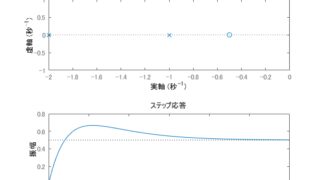 MATLAB/simulink MATLAB/simulink MATLAB/simulink ディジタル制御 代数 数学 MATLAB/simulink Manim 制御工学 解析 MATLAB/simulink MATLAB/simulink
MATLAB/simulink MATLAB/simulink MATLAB/simulink ディジタル制御 代数 数学 MATLAB/simulink Manim 制御工学 解析 MATLAB/simulink MATLAB/simulink  MATLAB/simulink
MATLAB/simulink