 MATLAB/simulink
MATLAB/simulink MatlabでPID制御のシミュレーションをする
MatlabでPID制御のシミュレーションをする。システムとPID制御器の伝達関数は\begin{align}P&=\frac{1}{s+1} \\C&=K_P + \frac{K_I}{s} + K_D s \end{align}またフィ...
MATLAB/simulink  ロバスト制御
ロバスト制御 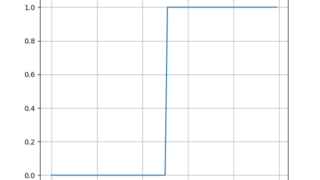 python 制御工学 制御工学 制御工学 制御工学
python 制御工学 制御工学 制御工学 制御工学  python
python  python 制御工学
python 制御工学  MATLAB/simulink
MATLAB/simulink  MATLAB/simulink 制御工学 ロバスト制御 MATLAB/simulink MATLAB/simulink 制御工学 制御工学 MATLAB/simulink 制御工学
MATLAB/simulink 制御工学 ロバスト制御 MATLAB/simulink MATLAB/simulink 制御工学 制御工学 MATLAB/simulink 制御工学