 制御工学
制御工学 RLCバンドパスフィルタの伝達関数
回路方程式が\begin{align}E _{I} =L\frac{di}{dt} + \frac{1}{C} \int i dt + Ri\end{align}のようなバンドパスフィルタを考える。いま出力が\begin{align}E_{...
制御工学 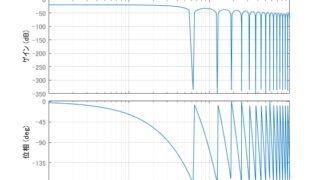 プログラミング 制御工学 MATLAB/simulink ディジタル制御 ディジタル制御 MATLAB/simulink 制御工学 制御工学 ディジタル制御 制御工学 制御工学 MATLAB/simulink 制御工学 制御工学
プログラミング 制御工学 MATLAB/simulink ディジタル制御 ディジタル制御 MATLAB/simulink 制御工学 制御工学 ディジタル制御 制御工学 制御工学 MATLAB/simulink 制御工学 制御工学  制御工学
制御工学  制御工学
制御工学  制御工学 制御工学
制御工学 制御工学  MATLAB/simulink
MATLAB/simulink