 ディジタル制御
ディジタル制御 MATLABで離散化された伝達関数のナイキスト線図を描く
離散化された伝達関数のナイキスト線図を描く。離散化された伝達関数を\begin{align}P(z^{-1})=\frac{1}{1+2z^{-1}+3z^{-2}}\end{align}とするとベクトル軌跡は\(z=e^{i \theta...
ディジタル制御 数学 MATLAB/simulink python MATLAB/simulink 数学 英文法 英文法 ディジタル制御 英文法 電験 電気機器 数学 交流 英文法 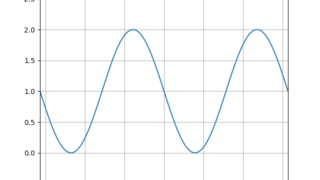 python python
python python  MATLAB/simulink ディジタル制御
MATLAB/simulink ディジタル制御 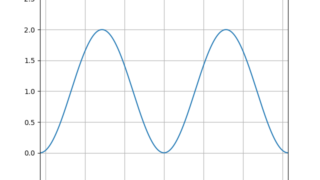 python
python