 python
python Pythonでナイキスト線図を書く
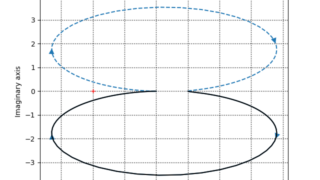
これの続き。Pythonでナイキスト線図を書いてみた。from control.matlab import *import numpy as npfrom matplotlib import pyplot as pltN=100t=np.l...
python  制御工学
制御工学  python python 制御工学
python python 制御工学  python
python  python
python  python ディジタル制御 システム同定
python ディジタル制御 システム同定  MATLAB/simulink 制御工学 ディジタル制御 ディジタル制御 制御工学 MATLAB/simulink 制御工学 制御工学
MATLAB/simulink 制御工学 ディジタル制御 ディジタル制御 制御工学 MATLAB/simulink 制御工学 制御工学  制御工学
制御工学  制御工学
制御工学