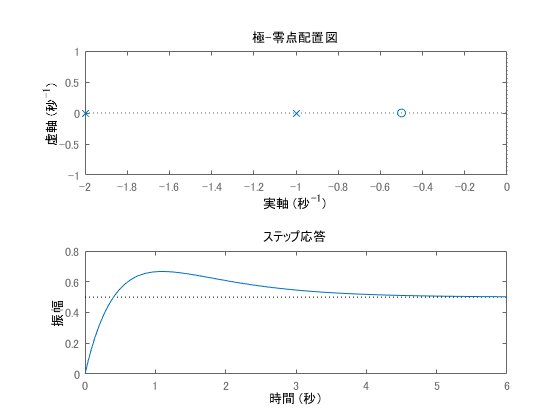
初めに連続時間システムの伝達関数の安定性を調べる。連続時間システムの伝達関数は
\begin{align}
P_1=\frac{ a_m s^m+a_{m-1} s^{m-1}+ \cdots + a_0}{ b_n s^n+b_{n-1} s^{n-1}+ \cdots + b_0}
\end{align}
で定義される。このシステムが安定であるにはシステムの極がすべて負であればよい。以下二種類の伝達関数についてstep応答を調べた。

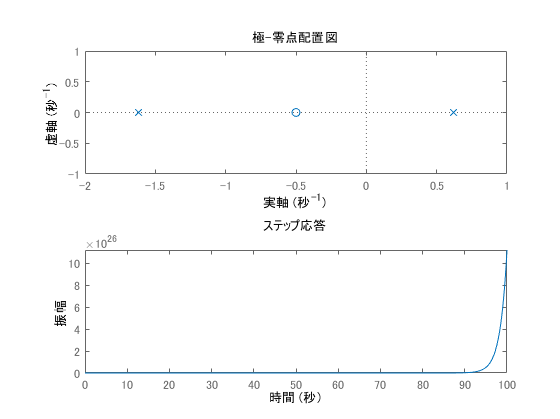
極の位置が正にあるシステムはシステム応答が発散していることがわかる。
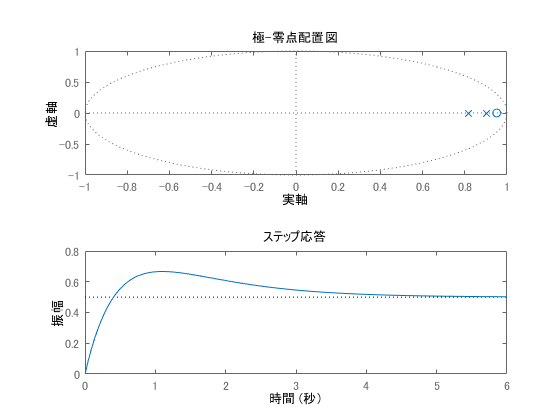
次に離散時間システムの伝達関数の安定性を調べる。離散時間システムの伝達関数は
\begin{align}
P_2=\frac{ a_m z^m+a_{m-1} z^{m-1}+ \cdots + a_0}{ b_n z^n+b_{n-1} z^{n-1}+ \cdots + b_0}
\end{align}
でてで定義される。これも同様に極を調べればよいが、前述と異なりすべての極が単位円内にあればよい。これも前述と同様の伝達関数でシミュレーションした。
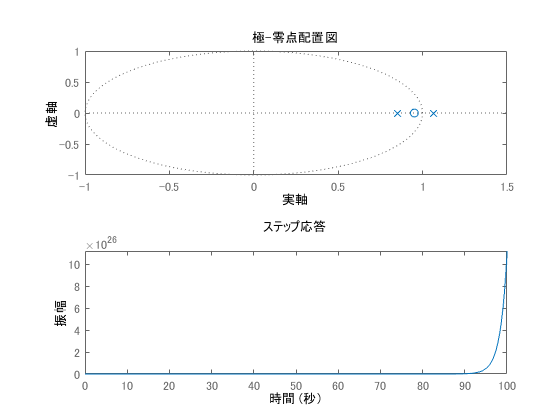
極の位置により発散してしまう様子が確認できた。
ソースはこれ
Ts=0.1;
s=tf('s');
P1=(2*s+1)/(s^2+3*s+2);
P2=(2*s+1)/(s^2+s-1);
figure
subplot(2,1,1)
pzmap(P1);
subplot(2,1,2)
step(P1);
figure
subplot(2,1,1)
pzmap(P2);
subplot(2,1,2)
step(P2);
dP1=c2d(P1,Ts,'zoh');
dP2=c2d(P2,Ts,'zoh');
figure
subplot(2,1,1)
pzmap(dP1);
subplot(2,1,2)
step(P1);
figure
subplot(2,1,1)
pzmap(dP2);
subplot(2,1,2)
step(dP2);

コメント