PID制御器をZiegler-Nicholsの限界感度法を用いて調整する。限界感度法は1時遅れ系+むだ時間もしくは積分系むだ時間の時有効となる手法である。
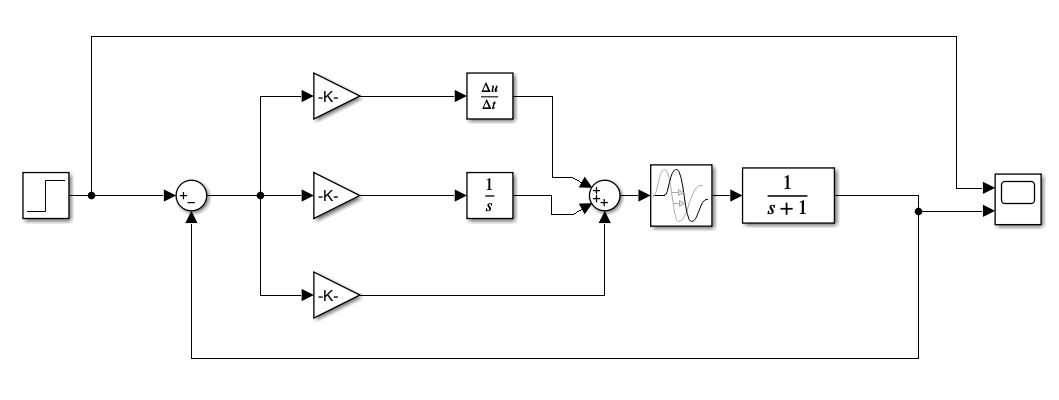
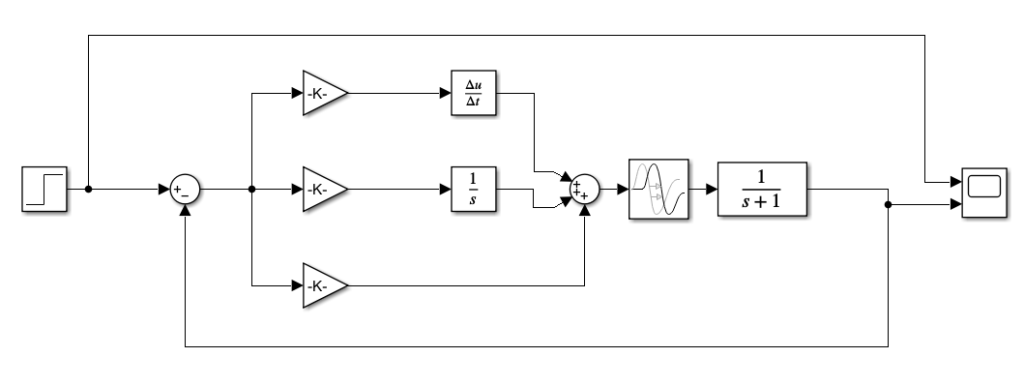
まず、simulinkで次のような 1時遅れ系+むだ時間のPID制御モデルを作成する。遅れ時間は\(0.3\)秒とした。
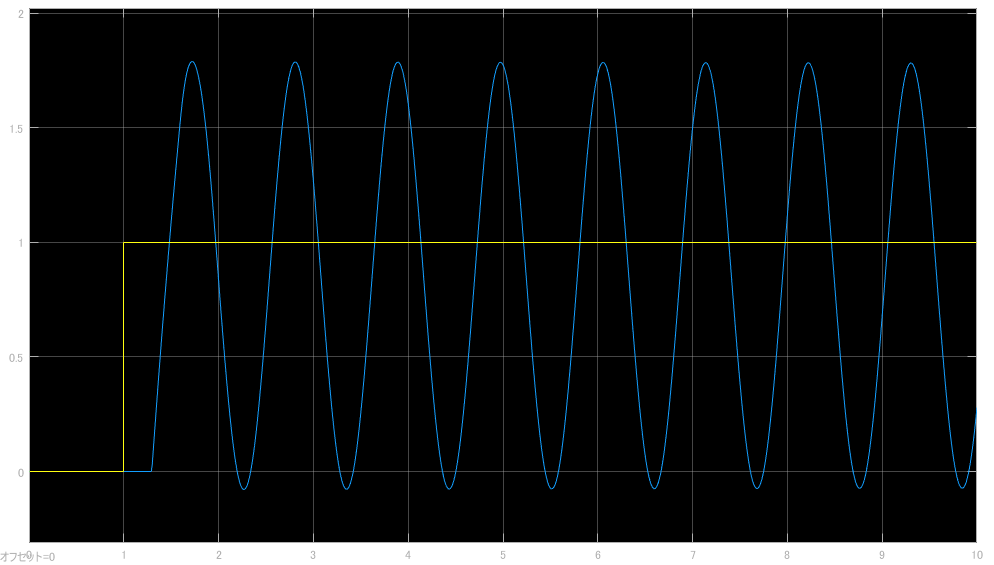
次に積分、微分ゲインを\(0\)にし、徐々に比例ゲインを上昇させ次のような持続振動が起こる状態を作る。このとき比例ゲインは \(K_p=5.89\)、 持続振動の周期は\(T_c=1.084\)であった。
最後に次の式
\begin{align}
G= K_P \left (1 + \frac{1}{T_I s} +T_D s \right)
\end{align}
と表を基にPIDゲインを決める。
| \(K_{P}\) | \(T_{I}\) | \(T_{D}\) | |
| P | \(0.5 K_{P}\) | ||
| PI | \(0.6 K_{P}\) | \(0.833 T_{C}\) | |
| PID | \(0.5 K_{P}\) | \(0.5 T_{C}\) | \(0.125 T_{c}\) |
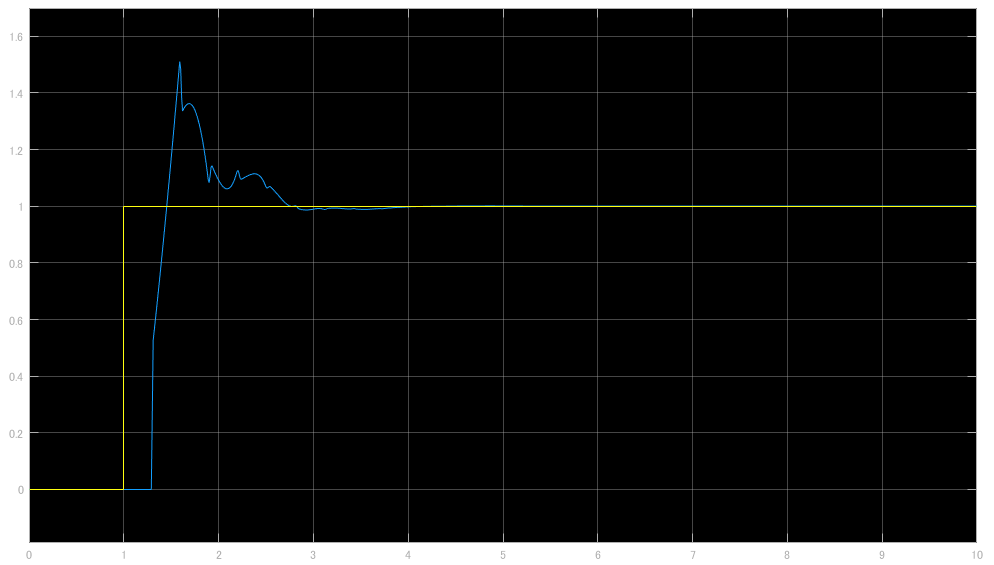
結果

コメント