 ロバスト制御
ロバスト制御 【制御】SISOシステムのH∞ノルム
安定でプロパなSISOシステムの\(H_∞\)ノルムは\begin{align}\|G(s) \|_\infty =\sup_{\omega} \{ G(j \omega) \}\end{align}で与えられる。
ロバスト制御 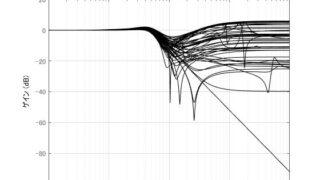 MATLAB/simulink
MATLAB/simulink 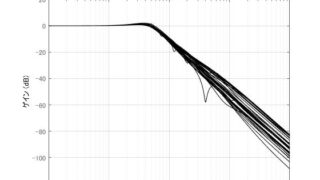 MATLAB/simulink ロバスト制御
MATLAB/simulink ロバスト制御