 MATLAB/simulink
MATLAB/simulink MATLABでテイラー展開してグラフ化するプログラムを書いた
MATLABでテイラー展開してグラフ化するプログラムを書いた。以下コードclose allf = @(x) cos(x);a = 0;n = 15;x_range = ;=plotTaylorSeries(f, a, n, x_range)...
MATLAB/simulink MATLAB/simulink MATLAB/simulink MATLAB/simulink MATLAB/simulink MATLAB/simulink MATLAB/simulink MATLAB/simulink MATLAB/simulink MATLAB/simulink MATLAB/simulink MATLAB/simulink 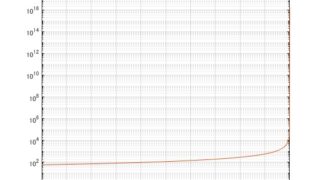 MATLAB/simulink MATLAB/simulink
MATLAB/simulink MATLAB/simulink  MATLAB/simulink MATLAB/simulink MATLAB/simulink MATLAB/simulink
MATLAB/simulink MATLAB/simulink MATLAB/simulink MATLAB/simulink 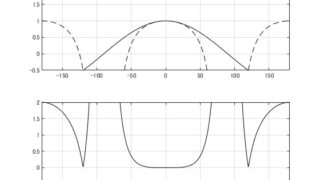 MATLAB/simulink
MATLAB/simulink 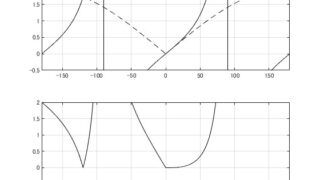 MATLAB/simulink
MATLAB/simulink