前回の記事の続き
前回と同様に逐次最小二乗法を用いて二次遅れ系の伝達関数
\begin{align}
G(s)=\frac{\omega_{n}^2 }{s^2 + 2 \zeta \omega_{n} s + \omega_{n}^2}
\end{align}
をARXモデル
\begin{align}
H(q) = \frac{b_{1} q + b_{2}}{q^{2} + a_{1} q +a_{2}}
\end{align}
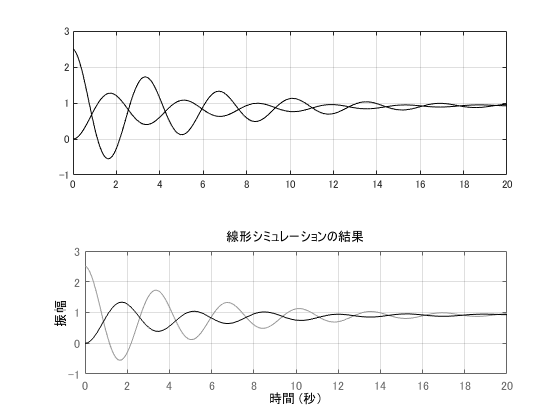
に近似する。今回はPID制御されていると想定し、入力をPID制御器の出力で与えた。

コメント